Introduction
最近偶然讀到 NLP 聖經 Speech and Language Processing,書中提到對於 HMM (Hidden Markov Model),最標準常見的解碼演算法其實是 Viterbi 演算法。
這讓我回頭重新研究小麥注音 (McBopomofo) 輸入法的核心選字引擎:Gramambular,並用簡化後的 Viterbi 進行重構。
Gramambular Architecture
Gramambular 是小麥注音負責從注音符號轉換為對應中文字的核心模組。它的原理是基於 Unigram 語言模型,透過最大概似估計 (Maximum Likelihood Estimation, MLE) 找出機率最高的候選字詞組合。同時為了避免浮點數運算產生的 underflow 問題,是以對數機率 (log probability) 進行計算。
在深入演算法之前,我們先來看看幾個定義在 Source/Engine/gramambular2/reading_grid.h 的核心資料結構:
1. Unigram
這是最基本的單位,代表一個詞及其對應的權重。Unigram 是最單純的語言模型,基於一個核心假設:字詞之間是相互獨立的,也就是說,某個字詞出現的機率與前文沒有關係。
class LanguageModel::Unigram {
std::string value_; // 字詞,例如「在」
std::string rawValue_; // 原始值
double score_; // 對數機率,例如 -2.23695407
};2. Node
Node 代表特定讀音下的候選字詞集合。例如輸入「ㄗㄞˋ」,可能對應到「在」、「再」等字。
class Node {
std::string reading_; // 讀音,如「ㄗㄞˋ」
size_t spanningLength_; // 跨越長度 (佔幾個注音)
std::vector<LanguageModel::Unigram> unigrams_; // 候選字詞列表
OverrideType overrideType_; // 使用者選字覆寫狀態
};3. Span
而 Span 則是指在 Grid 中「同一個起始位置」的所有節點集合。
class Span {
std::array<NodePtr, kMaximumSpanLength> nodes_; // 最多 8 個不同長度的節點
size_t maxLength_; // 目前最大長度
};4. ReadingGrid
整個 ReadingGrid 就是一個 Span 的陣列,其長度等於使用者輸入的注音符號數量。
class ReadingGrid {
std::vector<std::string> readings_; // 使用者輸入的注音序列
std::vector<Span> spans_; // 每個位置的 Span
size_t cursor_; // 游標位置
ScoreRankedLanguageModel lm_; // 語言模型介面
};Original Approach: DAG Shortest Path
ReadingGrid 本質上是一個有向無環圖 (DAG)。原先的解法對應到 Thomas H. Cormen 所著,資工系學生人手一本的演算法教科書 Introduction to Algorithms 上的 DAG Shortest Path 演算法 (其實我們找的是 longest path,因為對數機率越大越好)。
為了進行這個演算法,原始實作中定義了一個 Vertex 資料結構來表示 DAG 中的每個節點:
// Defines a vertex of a DAG. This is a mutable data structure used for both
// DAG construction and single-source shortest-path computation.
struct Vertex {
ReadingGrid::NodePtr node;
std::vector<Vertex*> edges;
// Used during topological-sort.
bool topologicallySorted = false;
// Used during shortest-path computation. We are actually computing the
// path with the *largest* weight, hence distance's initial value being
// negative infinity.
double distance = -std::numeric_limits<double>::infinity();
Vertex* prev = nullptr;
};整個演算法會經過以下幾個步驟:
1. Build Graph
假設輸入注音為「ㄕㄜˋ ㄐㄧˋ ㄔㄥˊ ㄕˋ ㄇㄚˇ」,目標是找出「設計程式碼」:
| Spans | spanLen | Nodes | Unigrams | 讀音 | 字詞 | 對數機率 | 備註 |
|---|---|---|---|---|---|---|---|
| 0 | 1 | 0 | 0 | ㄕㄜˋ | 社 | -3.10 | |
| 0 | 1 | 0 | 1 | ㄕㄜˋ | 設 | -3.19 | 「社」更高分,所以 「設」從不會被考慮 |
| 0 | 2 | 1 | 0 | ㄕㄜˋ ㄐㄧˋ | 設計 | -3.58 | |
| 1 | 1 | 0 | 0 | ㄐㄧˋ | 計 | -3.13 | |
| 2 | 1 | 0 | 0 | ㄔㄥˊ | 成 | -2.70 | |
| 2 | 2 | 1 | 0 | ㄔㄥˊ ㄕˋ | 城市 | -3.99 | |
| 2 | 2 | 1 | 1 | ㄔㄥˊ ㄕˋ | 程式 | -4.08 | 「城市」更高分,所以 「程式」從不會被考慮 |
| 2 | 3 | 2 | 0 | ㄔㄥˊ ㄕˋ ㄇㄚˇ | 程式碼 | -5.10 | |
| 3 | 1 | 0 | 0 | ㄕˋ | 是 | -2.04 | |
| 4 | 1 | 0 | 0 | ㄇㄚˇ | 馬 | -3.47 | |
| 4 | 1 | 0 | 1 | ㄇㄚˇ | 碼 | -4.06 | 「馬」更高分,所以 「碼」從不會被考慮 |
將每個 Node 包裝成一個獨立的 Vertex 物件,並將這些 Vertex 按照索引位置放入名為 vspans 的二維陣列中。
using VertexSpan = std::vector<Vertex>;
std::vector<VertexSpan> vspans(spans_.size(), VertexSpan());
for (size_t i = 0, len = spans_.size(); i < len; ++i) {
const ReadingGrid::Span& span = spans_[i];
for (size_t j = 1, maxSpanLen = span.maxLength(); j <= maxSpanLen; ++j) {
NodePtr p = span.nodeOf(j);
if (p != nullptr) {
vspans[i].emplace_back(std::move(p));
}
}
}vspan | 0 | 1 | 2 |
|---|---|---|---|
| 0 | 社 | 設計 | - |
| 1 | 計 | - | - |
| 2 | 成 | 城市 | 程式碼 |
| 3 | 是 | - | - |
| 4 | 馬 | - | - |
接著,為了跑單一來源最短路徑 (Single-source Shortest Path),加入了 _ROOT_ 與 _TERMINAL_ 這兩個虛擬節點。然後根據各字詞的跨越長度 (spanningLength),找出在陣列中下一個能接上的位置,並把目標 Vertex 的指標加進 edges 讓它連起來。
先接 TERMINAL 與中間各段:
Vertex terminal(std::make_shared<ReadingGrid::Node>(
"_TERMINAL_", 0, std::vector<LanguageModel::Unigram>()));
for (size_t i = 0, vspansLen = vspans.size(); i < vspansLen; ++i) {
for (Vertex& v : vspans[i]) {
size_t nextVertexPos = i + v.node->spanningLength();
if (nextVertexPos == vspansLen) {
v.edges.push_back(&terminal);
continue;
}
for (Vertex& nv : vspans[nextVertexPos]) {
v.edges.push_back(&nv);
}
}
}graph LR
%% Special Nodes
TERMINAL((_TERM_))
%% Regular Nodes
V1_1(( 社 ))
V1_2((設計))
V2_1(( 計 ))
V3_1(( 成 ))
V3_2((城市))
V3_3((程式碼))
V4_1(( 是 ))
V5_1(( 馬 ))
%% Edges
V1_1 --> V2_1
V1_2 --> V3_1
V1_2 --> V3_2
V1_2 --> V3_3
V2_1 --> V3_1
V2_1 --> V3_2
V2_1 --> V3_3
V3_1 --> V4_1
V3_2 --> V5_1
V3_3 --> TERMINAL
V4_1 --> V5_1
V5_1 --> TERMINAL
%% Styling
classDef special fill:#eeeeee,stroke:#999999,stroke-width:2px;
classDef normal fill:#e1f5fe,stroke:#01579b,stroke-width:2px;
class ROOT,TERMINAL special;
class V1_1,V1_2,V2_1,V3_1,V3_2,V3_3,V4_1,V5_1 normal;
Vertex root(std::make_shared<ReadingGrid::Node>(
"_ROOT_", 0, std::vector<LanguageModel::Unigram>()));
root.distance = 0;
for (Vertex& v : vspans[0]) {
root.edges.push_back(&v);
}最後將 ROOT 也連接上來,我們就可以得到:
graph LR
%% Special Nodes
ROOT((_ROOT_))
TERMINAL((_TERM_))
%% Regular Nodes
V1_1(( 社 ))
V1_2((設計))
V2_1(( 計 ))
V3_1(( 成 ))
V3_2((城市))
V3_3((程式碼))
V4_1(( 是 ))
V5_1(( 馬 ))
%% Edges
ROOT --> V1_1
ROOT --> V1_2
V1_1 --> V2_1
V1_2 --> V3_1
V1_2 --> V3_2
V1_2 --> V3_3
V2_1 --> V3_1
V2_1 --> V3_2
V2_1 --> V3_3
V3_1 --> V4_1
V3_2 --> V5_1
V3_3 --> TERMINAL
V4_1 --> V5_1
V5_1 --> TERMINAL
%% Styling
classDef special fill:#eeeeee,stroke:#999999,stroke-width:2px;
classDef normal fill:#e1f5fe,stroke:#01579b,stroke-width:2px;
class ROOT,TERMINAL special;
class V1_1,V1_2,V2_1,V3_1,V3_2,V3_3,V4_1,V5_1 normal;
2. Topological Sort (拓撲排序)
雖然 ReadingGrid 本身從左到右有著絕對的方向性,但原先的實作仍會從 _ROOT_ 出發,透過深度優先搜尋 (DFS) 對整張圖進行標準的拓撲排序。為了加速,這裡使用 stack 與 State 來實作非遞迴版本的 DFS。
std::vector<Vertex*> TopologicalSort(Vertex* root) {
std::vector<Vertex*> result;
struct State {
explicit State(Vertex* vv) : v(vv), edgeIter(v->edges.begin()) {}
Vertex* v;
std::vector<Vertex*>::iterator edgeIter;
};
std::stack<State> stack;
stack.emplace(root);
while (!stack.empty()) {
State& state = stack.top();
Vertex* v = state.v;
// 依序存取所有的邊
if (state.edgeIter != v->edges.end()) {
Vertex* nv = *state.edgeIter;
++state.edgeIter;
if (!nv->topologicallySorted) {
stack.emplace(nv);
continue;
}
}
// 當此節點所有相鄰邊都存取完後,將其標記並推入結果陣列
v->topologicallySorted = true;
result.push_back(v);
stack.pop();
}
return result; // 注意這裡回傳的是 Post-Order,需要反轉才是正常的拓撲排序
}回傳出來的結果中,排在最後面的反而會是開頭的節點 _ROOT_,所以我們會得到一個 Post-Order 序列:
graph RL
%% Nodes in Post-Order
TERMINAL((_TERM_))
V5_1(( 馬 ))
V4_1(( 是 ))
V3_1(( 成 ))
V3_2((城市))
V3_3((程式碼))
V2_1(( 計 ))
V1_1(( 社 ))
V1_2((設計))
ROOT((_ROOT_))
%% Reverse Post-Order sequence flow
ROOT --> V1_2 --> V1_1 --> V2_1 --> V3_3 --> V3_2 --> V3_1 --> V4_1 --> V5_1 --> TERMINAL
%% Styling
classDef special fill:#eeeeee,stroke:#999999,stroke-width:2px;
classDef normal fill:#e1f5fe,stroke:#01579b,stroke-width:2px;
class TERMINAL,ROOT special;
class V1_1,V1_2,V2_1,V3_1,V3_2,V3_3,V4_1,V5_1 normal;
3. Relax (鬆弛)
在此階段,我們會將剛才拿到的拓撲陣列以反向順序 (也就是正常的拓撲從頭到尾順序),依序對每個節點的相鄰邊進行 Relax 的動作。只要到達相鄰節點 v 的目前距離小於「經過節點 u 的距離加上節點 v 本身的權重」,就更新節點 v 的最佳距離以及 prev。
因為我們追求的是最大的對數機率,所以
Vertex初始化時的 distance 都是負無限大。
void Relax(Vertex* u, Vertex* v) {
// 將目標節點的對數機率分數當作這條邊權重
double w = v->node->score();
// 若從節點 u 走過去可以累積更高的分數,則更新對 v 的最佳路徑
if (v->distance < u->distance + w) {
v->distance = u->distance + w;
v->prev = u;
}
}
// ...
std::vector<Vertex*> ordered = TopologicalSort(&root);
// 反向從 rbegin 到 rend,也就是用正常的拓撲排序順序來進行 Relax
for (auto it = ordered.rbegin(), rend = ordered.rend(); it != rend; ++it) {
Vertex* u = *it;
for (Vertex* v : u->edges) {
Relax(u, v);
}
}經過 Relax 之後,路徑上 distance 與 prev 就能夠正確對應:
graph RL
TERMINAL(("_TERM_<br>-8.68"))
ROOT((_ROOT_<br>0))
V1_1((社<br>-3.10))
V1_2((設計<br>-3.58))
V2_1((計<br>-6.23))
V3_1((成<br>-6.28))
V3_2((城市<br>-7.57))
V3_3(("程式碼<br>-8.68"))
V4_1((是<br>-8.32))
V5_1((馬<br>-11.04))
TERMINAL -->|prev| V3_3
TERMINAL -.-> V5_1
V5_1 -->|prev| V3_2
V5_1 -.-> V4_1
V4_1 -->|prev| V3_1
V3_3 -->|prev| V1_2
V3_2 -->|prev| V1_2
V3_1 -->|prev| V1_2
V3_1 -.-> V2_1
V2_1 -->|prev| V1_1
V1_2 -->|prev| ROOT
V1_1 -->|prev| ROOT
classDef special fill:#eeeeee,stroke:#999999,stroke-width:2px;
classDef best fill:#ffe0b2,stroke:#e65100,stroke-width:3px;
classDef normal fill:#e1f5fe,stroke:#01579b,stroke-width:2px;
class ROOT best;
class V1_1,V2_1,V3_1,V3_2,V4_1,V5_1 normal;
class V1_2,V3_3,TERMINAL best;
linkStyle 0,5,10 stroke:#d84315,stroke-width:4px,fill:none;
當走到終點 _TERMINAL_ 時,沿著 prev 回推可得到分數總和最高的路徑:程式碼 → 設計 (總分 ,優於經過 馬 的路徑 )。
4. Path Reconstruction (路徑回溯)
最後我們進行簡單的路徑回推,從 _TERMINAL_ 開始,沿著 prev 記錄的反向指標一路回頭存取,將走過的節點 (node) 存到 walked 陣列中。最後只要不收錄 _ROOT_ 與 _TERMINAL_ 並翻轉整個陣列的順序,即為預測出來的最佳注音選字結果。
std::vector<NodePtr> walked;
Vertex* it = &terminal;
// 沿著 prev 一步步走回去
while (it->prev != nullptr) {
walked.push_back(it->prev->node);
it = it->prev;
}
// 去除前後虛擬節點,並且翻轉輸出 (從 rbegin + 1 開始取即可略過 _ROOT_)
result.nodes = std::vector<NodePtr>(walked.rbegin() + 1, walked.rend());graph RL
TERMINAL((_TERM_))
V3_3((程式碼))
V1_2(( 設計 ))
ROOT((_ROOT_))
TERMINAL -->|prev| V3_3
V3_3 -->|prev| V1_2
V1_2 -->|prev| ROOT
classDef node fill:#ffe0b2,stroke:#e65100,stroke-width:3px;
class TERMINAL,V3_3,V1_2,ROOT node;
%% Highlight
linkStyle 0,1,2 stroke:#d84315,stroke-width:4px,fill:none;
這個演算法理論上的時間複雜度是 。然而,在效能分析的過程中發現,建圖和拓樸排序的過程帶來了明顯的瓶頸,我們花了不少時間與記憶體來從 spans_ 裡去產生 Vertex 來建圖,而這些額外的開銷會花不少時間。
Viterbi
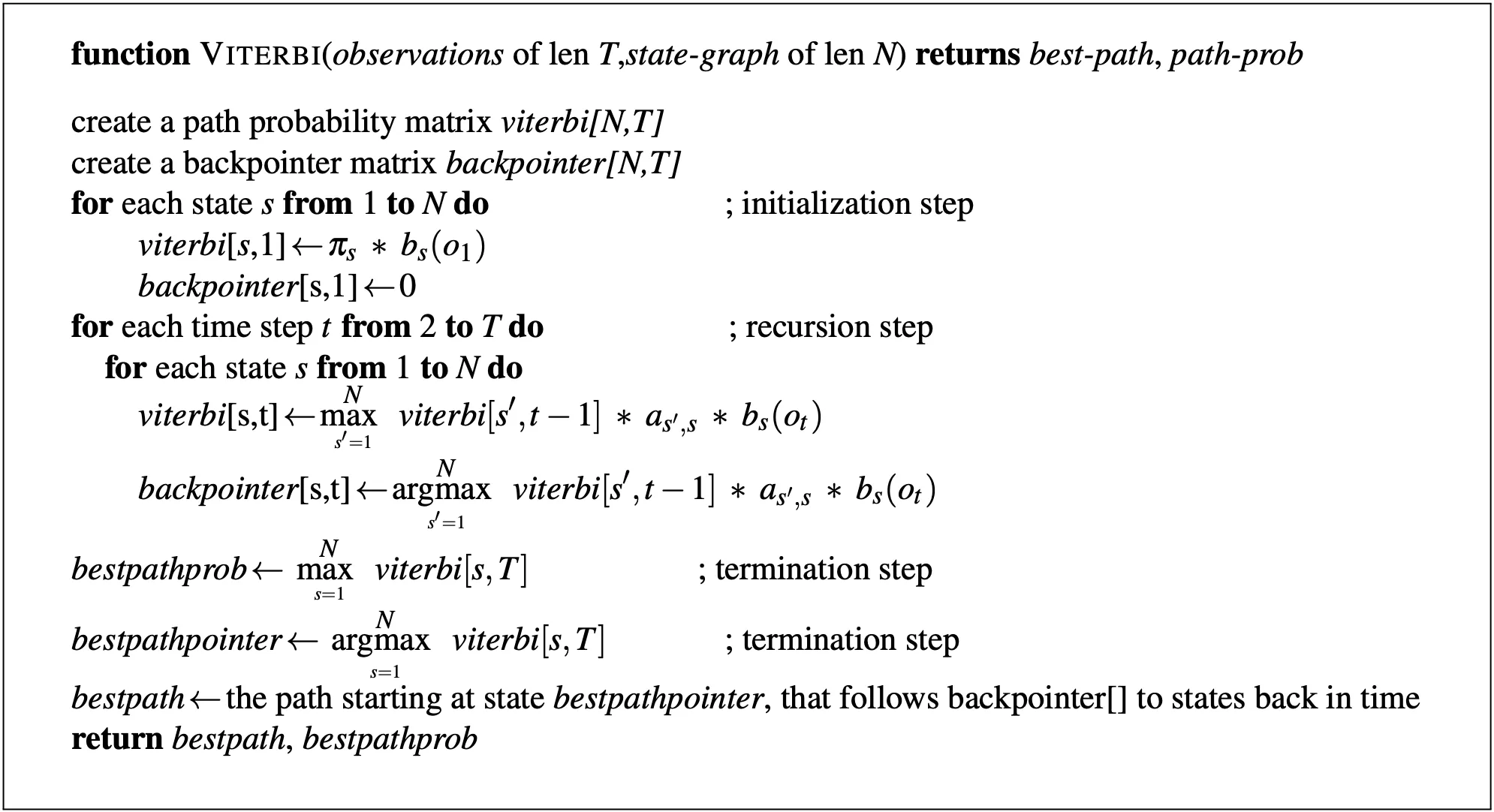
符號意義
| 符號 | 意義 |
|---|---|
| 觀測序列的總長度 (時間步數) | |
| 隱藏狀態的總數量 | |
| 在時間 觀察到的觀測值 | |
| 初始機率 (initial probability),即系統一開始處於狀態 的機率 | |
| 轉移機率 (transition probability),從前一個狀態 轉移到目前狀態 的機率 | |
| 發射機率 (emission probability),在狀態 下產生觀測值 的機率 | |
| 在時間 處於狀態 且觀測到前 個觀測值的最大機率值 | |
| 記錄在時間 到達狀態 時,最可能的前一個狀態是誰 (用於最後回溯路徑) |
1. Initialization (初始化)
對於每個狀態 到 :
在時間 (第一步),我們計算每個狀態作為起始狀態的機率。
-
這等於「初始機率 」乘以「在該狀態下看到第一個觀測值 的機率 」。
-
設為 0,因為前面沒有狀態了。
2. Recursion (遞迴)
這裡的遞迴是指數學意義上的「遞迴關係」,不是程設中的函式自己呼叫自己
對於每個時間 到 ,以及每個狀態 到 :
這步是演算法的核心,利用動態規劃的觀念:
- 為了算出在時間 處於狀態 的最大機率,我們檢查所有可能的前一狀態
- 我們選取一個 ,使得「前一狀態的機率 」「從 到 的轉移機率 」「在狀態 產生的觀測值機率 」達到最大
- :計算並儲存這個最高的機率值到 裡
- :將「會有最高機率的前一個狀態 」記錄在 中,就像是在走迷宮時,在每個路口標記「我是從哪個路口過來的」
3. Termination (終止)
當時間到達最後一步 時:
- 我們在 中找到機率最大的那個狀態,這個機率就是整條路徑的
- 同時找到對應的最後一個狀態
4. Path Backtracking (路徑回溯)
- 從最後一個狀態 開始,根據 矩陣中記錄的指標,一步步往回找
- 例如:時間 的狀態是指向 ,時間 的狀態又指向 … 直到回到時間 。
- 最後將這條路徑反轉,我們就得到了最佳路徑~
看起來是不是很複雜?沒關係,我也這麼覺得XD
既然選字的邏輯只是要求解有向無環圖中的最短 (長) 路徑,於是我參考了 Vlad Niculae 教授的課程投影片,他寫的非常簡單清楚:
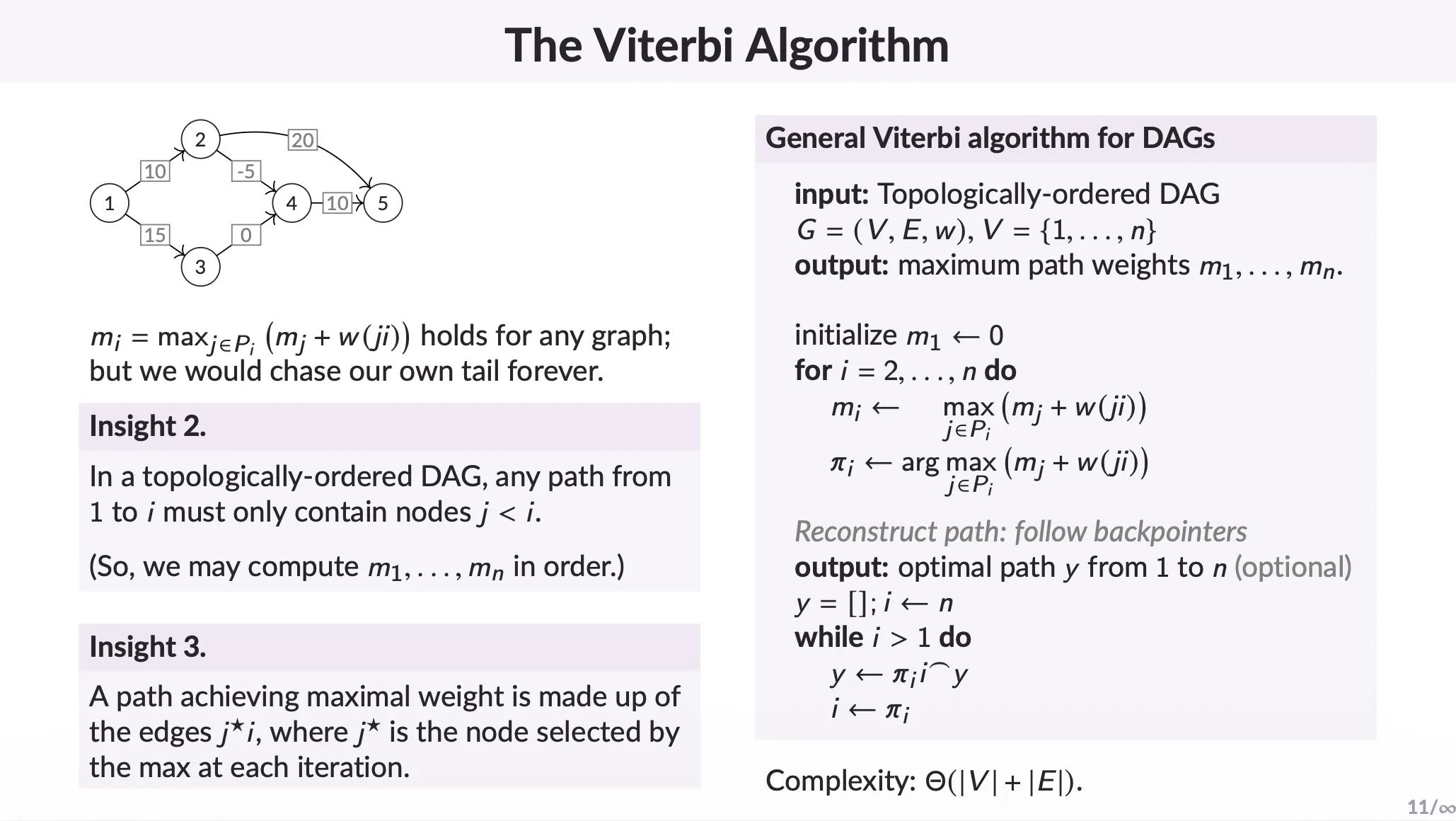
以下的實作就是照著這張投影片刻出來的。
The Refactoring: Viterbi Algorithm
觀察 ReadingGrid 的結構,可以發現它其實是一個線性的 lattice。每個節點從位置 i 開始,跨越 spanLen 長度,結束在 i + spanLen。因為 spanLen >= 1,邊的方向永遠是向後的 (index 變大)。
這代表:陣列的索引順序自然就是拓樸順序 (topological order)。我們其實不需要額外建立 Graph 或進行拓樸排序,可直接參考 Viterbi 演算法的概念進行重構。
1. Data Structure
Viterbi 本質上是一個動態規劃 (DP) 的問題,我們只需要一個簡單的 State 結構來紀錄 DP 狀態:
// Defines a state in the DP table.
struct State {
size_t fromIndex = 0;
ReadingGrid::NodePtr fromNode = nullptr;
double maxScore = -std::numeric_limits<double>::infinity();
};2: Accumulating Maximum Scores
演算法的核心就是計算到達每個位置的最大累積機率。
我們從位置 0 開始掃描到結尾。對於位置 i 的所有候選節點 (Node),我們計算接上這個 Node 後的分數,並嘗試更新目標位置 i + spanLen 的最大分數。
這其實對應到剛剛 Viterbi 中的遞迴關係:
但因為我們是 Unigram 模型,沒有轉移機率 (),且使用的是對數機率 (乘法變加法),公式簡化為:
程式碼實作如下:
const size_t readingLen = readings_.size();
std::vector<State> viterbi(readingLen + 1);
viterbi[0].maxScore = 0.0;
for (size_t i = 0; i < readingLen; ++i) {
const ReadingGrid::Span& span = spans_[i];
const size_t maxSpanLen = span.maxLength();
for (size_t spanLen = 1; spanLen <= maxSpanLen; ++spanLen) {
const ReadingGrid::NodePtr& node = span.nodeOf(spanLen);
if (node == nullptr) {
continue;
}
// Relaxation: Update target state if current path is better
double score = viterbi[i].maxScore + node->score();
State& target = viterbi[i + spanLen];
if (score > target.maxScore) {
target.maxScore = score;
target.fromNode = node;
target.fromIndex = i;
}
}
}3: Path Reconstruction (Backtracking)
當 DP 表格填滿後,最後一個位置紀錄的 maxScore 就是最佳路徑的總分。此時我們只需要沿著 fromIndex 和 fromNode 一路回溯 (backtrack) 到起點,就能還原出整條路徑 (當然最後要記得反轉一下)。
// Reconstruct the most likely path by tracing back
for (size_t curr = readingLen; curr > 0; curr = viterbi[curr].fromIndex) {
result.nodes.emplace_back(std::move(viterbi[curr].fromNode));
}
std::reverse(result.nodes.begin(), result.nodes.end());4. Walkthrough Example
假設輸入注音為「ㄕㄜˋ ㄐㄧˋ ㄔㄥˊ ㄕˋ ㄇㄚˇ」,目標是找出「設計程式碼」:
| Spans | spanLen | Nodes | Unigrams | 讀音 | 字詞 | 對數機率 | 備註 |
|---|---|---|---|---|---|---|---|
| 0 | 1 | 0 | 0 | ㄕㄜˋ | 社 | -3.10 | |
| 0 | 1 | 0 | 1 | ㄕㄜˋ | 設 | -3.19 | 「社」更高分,所以 「設」從不會被考慮 |
| 0 | 2 | 1 | 0 | ㄕㄜˋ ㄐㄧˋ | 設計 | -3.58 | |
| 1 | 1 | 0 | 0 | ㄐㄧˋ | 計 | -3.13 | |
| 2 | 1 | 0 | 0 | ㄔㄥˊ | 成 | -2.70 | |
| 2 | 2 | 1 | 0 | ㄔㄥˊ ㄕˋ | 城市 | -3.99 | |
| 2 | 2 | 1 | 1 | ㄔㄥˊ ㄕˋ | 程式 | -4.08 | 「城市」更高分,所以 「程式」從不會被考慮 |
| 2 | 3 | 2 | 0 | ㄔㄥˊ ㄕˋ ㄇㄚˇ | 程式碼 | -5.10 | |
| 3 | 1 | 0 | 0 | ㄕˋ | 是 | -2.04 | |
| 4 | 1 | 0 | 0 | ㄇㄚˇ | 馬 | -3.47 | |
| 4 | 1 | 0 | 1 | ㄇㄚˇ | 碼 | -4.06 | 「馬」更高分,所以 「碼」從不會被考慮 |
我們定義:
viterbi[i]maxScore:到達位置i的最大分數 (log probability,越大越好)fromIndex:最佳路徑來自哪個位置fromNode:到達位置i時來自哪個字詞
初始條件:
maxScore | fromIndex | fromNode | |
|---|---|---|---|
viterbi[0] | 0.0 | - | - |
viterbi[1]
候選路徑:
i | spanLen | 字詞 | 詞頻 | 計算 | 結果 |
|---|---|---|---|---|---|
| 0 | 1 | 社 | -3.10 | 0.00 + (-3.10) | -3.10 |
結果如圖所示,注意每一個 V 都是對應到 viterbi[i] 的狀態,邊的權重則是對應到 Node 的分數:
graph LR %% Nodes V0((V0)) V1((V1)) %% Edges V0 -->|"社 -3.10"| V1 %% Styling classDef selected fill:#ffe0b2,stroke:#e65100,stroke-width:3px; class V0,V1 selected; %% Link 0: V0->V1 %% Highlight Link 1 & 6 linkStyle 0 stroke:#d84315,stroke-width:4px,fill:none;
更新:
maxScore | fromIndex | fromNode | |
|---|---|---|---|
viterbi[0] | 0.0 | - | - |
viterbi[1] | -3.10 | 0 | 社 |
viterbi[2]
候選路徑:
i | spanLen | 字詞 | 詞頻 | 計算 | 結果 |
|---|---|---|---|---|---|
| 0 | 2 | 設計 | -3.58 | 0.00 + (-3.58) | -3.58 |
| 1 | 1 | 計 | -3.13 | -3.10 + (-3.13) | -6.23 |
比較:
- -3.58 > -6.23
- 選擇「設計」
結果如圖所示,注意每一個 V 都是對應到 viterbi[i] 的狀態,邊的權重則是對應到 Node 的分數:
graph LR %% Nodes V0((V0)) V1((V1)) V2((V2)) %% Edges V0 -->|"社 -3.10"| V1 V0 -->|"設計 -3.58"| V2 V1 -->|"計 -3.13"| V2 %% Styling classDef state fill:#e1f5fe,stroke:#01579b,stroke-width:2px; classDef selected fill:#ffe0b2,stroke:#e65100,stroke-width:3px; class V0,V2 selected; class V1 state; %% Link 0: V0->V1 %% Link 1: V0->V2 %% Link 2: V1->V2 %% Highlight Link 1 & 6 linkStyle 1 stroke:#d84315,stroke-width:4px,fill:none;
更新:
maxScore | fromIndex | fromNode | |
|---|---|---|---|
viterbi[0] | 0.0 | - | - |
viterbi[1] | -3.10 | 0 | 社 |
viterbi[2] | -3.58 | 0 | 設計 |
viterbi[3]
候選路徑:
i | spanLen | 字詞 | 詞頻 | 計算 | 結果 |
|---|---|---|---|---|---|
| 2 | 1 | 成 | -2.70 | -3.58 + (-2.70) | -6.28 |
結果如圖所示,注意每一個 V 都是對應到 viterbi[i] 的狀態,邊的權重則是對應到 Node 的分數:
graph LR %% Nodes V0((V0)) V1((V1)) V2((V2)) V3((V3)) %% Edges V0 -->|"社 -3.10"| V1 V0 -->|"設計 -3.58"| V2 V1 -->|"計 -3.13"| V2 V2 -->|"成 -2.70"| V3 %% Styling classDef state fill:#e1f5fe,stroke:#01579b,stroke-width:2px; classDef selected fill:#ffe0b2,stroke:#e65100,stroke-width:3px; class V0,V2,V3 selected; class V1 state; %% Link 0: V0->V1 %% Link 1: V0->V2 %% Link 2: V1->V2 %% Link 3: V2->V3 %% Highlight Link 1 linkStyle 1,3 stroke:#d84315,stroke-width:4px,fill:none;
更新:
maxScore | fromIndex | fromNode | |
|---|---|---|---|
viterbi[0] | 0.0 | - | - |
viterbi[1] | -3.10 | 0 | 社 |
viterbi[2] | -3.58 | 0 | 設計 |
viterbi[3] | -6.28 | 2 | 成 |
viterbi[4]
候選路徑:
i | spanLen | 字詞 | 詞頻 | 計算 | 結果 |
|---|---|---|---|---|---|
| 2 | 2 | 城市 | -3.99 | -3.58 + (-3.99) | -7.57 |
| 3 | 1 | 是 | -2.04 | -6.28 + (-2.04) | -8.32 |
比較:
- -7.57 > -8.32
- 選擇「城市」
結果如圖所示,注意每一個 V 都是對應到 viterbi[i] 的狀態,邊的權重則是對應到 Node 的分數:
graph LR %% Nodes V0((V0)) V1((V1)) V2((V2)) V3((V3)) V4((V4)) %% Edges V0 -->|"社 -3.10"| V1 V0 -->|"設計 -3.58"| V2 V1 -->|"計 -3.13"| V2 V2 -->|"成 -2.70"| V3 V2 -->|"城市 -3.99"| V4 V3 -->|"是 -2.04"| V4 %% Styling classDef state fill:#e1f5fe,stroke:#01579b,stroke-width:2px; classDef selected fill:#ffe0b2,stroke:#e65100,stroke-width:3px; class V0,V2,V4 selected; class V1,V3 state; %% Link 0: V0->V1 %% Link 1: V0->V2 %% Link 2: V1->V2 %% Link 3: V2->V3 %% Link 4: V2->V4 %% Link 5: V3->V4 %% Highlight Link 1 & 6 linkStyle 1,4 stroke:#d84315,stroke-width:4px,fill:none;
更新:
maxScore | fromIndex | fromNode | |
|---|---|---|---|
viterbi[0] | 0.0 | - | - |
viterbi[1] | -3.10 | 0 | 社 |
viterbi[2] | -3.58 | 0 | 設計 |
viterbi[3] | -6.28 | 2 | 成 |
viterbi[4] | -7.57 | 2 | 城市 |
viterbi[5]
候選路徑:
i | spanLen | 字詞 | 詞頻 | 計算 | 結果 |
|---|---|---|---|---|---|
| 2 | 3 | 程式碼 | -5.10 | -3.58 + (-5.10) | -8.68 |
| 4 | 1 | 馬 | -3.47 | -7.57 + (-3.47) | -11.04 |
比較:
- -8.68 > -11.04
- 選擇「程式碼」
結果如圖所示,注意每一個 V 都是對應到 viterbi[i] 的狀態,邊的權重則是對應到 Node 的分數:
graph LR %% Nodes V0((V0)) V1((V1)) V2((V2)) V3((V3)) V4((V4)) V5((V5)) %% Edges V0 -->|"社 -3.10"| V1 V0 -->|"設計 -3.58"| V2 V1 -->|"計 -3.13"| V2 V2 -->|"成 -2.70"| V3 V2 -->|"城市 -3.99"| V4 V3 -->|"是 -2.04"| V4 V2 -->|"程式碼 -5.10"| V5 V4 -->|"馬 -3.47"| V5 %% Styling classDef state fill:#e1f5fe,stroke:#01579b,stroke-width:2px; classDef selected fill:#ffe0b2,stroke:#e65100,stroke-width:3px; class V0,V2,V5 selected; class V1,V3,V4 state; %% Link 0: V0->V1 %% Link 1: V0->V2 %% Link 2: V1->V2 %% Link 3: V2->V3 %% Link 4: V2->V4 %% Link 5: V3->V4 %% Link 6: V2->V5 %% Link 7: V4->V5 %% Highlight Link 1 & 6 linkStyle 1,6 stroke:#d84315,stroke-width:4px,fill:none;
更新:
maxScore | fromIndex | fromNode | |
|---|---|---|---|
viterbi[0] | 0.0 | - | - |
viterbi[1] | -3.10 | 0 | 社 |
viterbi[2] | -3.58 | 0 | 設計 |
viterbi[3] | -6.28 | 2 | 成 |
viterbi[4] | -7.57 | 2 | 城市 |
viterbi[5] | -8.68 | 2 | 程式碼 |
Path Reconstruction (Backtracking)
從終點開始回推:
curr | fromIndex | fromNode |
|---|---|---|
| 5 | 2 | 程式碼 |
| 2 | 0 | 設計 |
| 0 | - | - |
順序反轉後得到最終路徑:設計 + 程式碼
graph LR %% Nodes V0((V0)) V2((V2)) V5((V5)) %% Edges V0 -->|"設計 -3.58"| V2 V2 -->|"程式碼 -5.10"| V5 %% Styling classDef selected fill:#ffe0b2,stroke:#e65100,stroke-width:3px; class V0,V2,V5 selected; %% Link 0: V0->V2 %% Link 1: V2->V5 %% Highlight Link 0 & 1 linkStyle 0,1 stroke:#d84315,stroke-width:4px,fill:none;
Performance
這次重構移除了舊有的 Vertex 結構與拓撲排序步驟,直接在陣列上操作,順帶改善了 cache locality 並減少了記憶體使用量。
使用 reading_grid_test.cpp 中的壓力測試:
TEST(ReadingGridTest, StressTest) {
constexpr char kStressData[] = R"(
ㄧ 一 -2.08170692
ㄧ-ㄧ 一一 -4.38468400
)";
ReadingGrid grid(std::make_shared<SimpleLM>(kStressData));
for (int i = 0; i < 8001; i++) {
grid.insertReading("ㄧ");
}
ReadingGrid::WalkResult result = grid.walk();
std::cout << "stress test elapsed: " << result.elapsedMicroseconds
<< " microseconds, vertices: " << result.vertices
<< ", edges: " << result.edges << "\n";
}在 MacBook Air M2 / 16 GB 上、以 -DCMAKE_BUILD_TYPE=Release 編譯測試結果如下:
1. DAG Shortest Path
stress test elapsed: 951 microseconds, vertices: 16001, edges: 319962. Viterbi Algorithm
stress test elapsed: 202 microseconds, vertices: 8001, edges: 16001我們可以發現,演算法複雜度一樣是 ,但是 與 的意義改變了!
- 對應到注音的個數,也就是 Viterbi 的 states
- 則是候選字詞的轉移 (candidate word transitions)
| Algorithm | Round 1 | Round 2 | Round 3 | |
|---|---|---|---|---|
| Before | DAG Shortest Path | 951 us | 956 us | 1014 us |
| After | Viterbi Algorithm | 202 us | 213 us | 219 us |
效能提升了好幾倍!雖然實際使用應該是感覺不出來~但這說明在演算法複雜度相同為 的情況下,減少常數項開銷 (constant overhead) 與資料結構的簡化,仍能帶來巨大的效能差異。